Micro and nano swimmers: How can miniature robots “swim” within the human body?
When he attended school in the city of Tashkent (the capital city of Uzbekistan, formerly part of the USSR) he showed curiosity for the various fields of science, and participated in various classes, from history and archeology – “I even participated in the excavations of the local National History Museum and the coins that we found were put on display ,” says Prof. Alex Leshansky. Then Prof. Leshansky became interested in astronomy, chemistry, and physics, and began more in-depth studies of physics and mathematics.
“After graduating from high school, I was accepted to the Mendeleev Institute of Chemical Technology in Moscow and completed three years of the BSc program there before making Aliya to Israel with my family in 1991. I knew that the Technion was the right place to continue my higher education, and immediately after finishing studying Hebrew in an Ulpan and summer studies at the University of Haifa (which was simply excellent!) I was accepted to the Technion with no additional requirements for learning the Hebrew language, which was not trivial. By the way, at that time in the early 1990s, a fairly large number of former students from the institute in Moscow, some of whom I knew back there, studied with me. One of the faculty members (Prof. Slava Freger) also graduated from the same institute. After I completed my B.Sc. in Chemical Engineering at the Technion in 1994, I also managed to complete my MSc studies in our Department under the guidance of Prof. (now Emeritus) Avinoam Nir. I was then drafted for my mandatory service at an experimental unit of ordnance corps of IDF, and at the same time I continued my research with Prof. Nir on new interesting problems related to thermocapillary phenomena. After the discharge from IDF, I went on to a doctorate in the inter-disciplinary program for Applied Mathematics at the Technion under the guidance of Prof. Nir and Prof. Len Pismen, followed by a post-doctorate at the California Institute of Technology (Caltech) in 2002. I returned to the Department in 2004 and established my own research group.”

Prof. Leshansky’s research group focuses on theoretical research of momentum, heat and mass transport. Lately, the group started working on microfluidics and micro- / nanopropellers. These two fields have significantly advanced lately towards many practical uses. Some startup companies advance microfluidic technologies for quick and accurate bio-medical applications, such as PixCell medical which develops a mobile device for fast and precise blood tests using the viscoelastic focusing technology developed by Prof. Leshansky’s research group in collaboration with researchers from Biomedical Engineering. Another company, Bionaout, develops magnetic micro-swimmers that can be steered inside a human patient’s body to assist in targeted drug delivery and other medical procedures.
Prof. Leshansky’s research group collaborates with experimentalists in Israel and abroad, and provides a strong theoretical foundation to understand and predict small-scale processes. Among the collaborators are Prof. Patrick Tabeling from ESPCI (Paris Tech) in France with which the group collaborates on microfluidics, Prof. Peer Fischer from the Max Planck Institute on Intelligent Systems with which the group collaborates on micro-propellers, Prof. Ambarish Ghosh from Indian Institute of Science, and others.
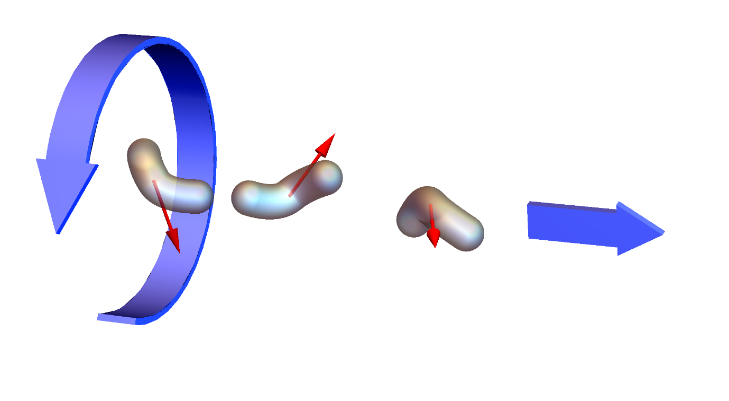
Counter to our intuition, the researchers in Prof. Leshansky’s group found that the helical flagellum designed by nature is not the optimal solution for motion at small scales, but rather a shape of a chubby arc with twisted ends.
One of the breakthroughs lead by Prof. Leshansky is improved swimming for nanoscale robotic swimmers in the human body. In this work, the researchers asked what would the optimal configuration of nano-scale robots be for motion within the human body, e.g., for targeted drug delivery applications. Inspired by the flagellum mechanism common in bacteria, the researchers have developed tiny spirals propelled by a rotating magnetic field. This work led to a new theory to compute the optimal velocity of the magnetic nano-swimmers based on their shape and magnetic properties. Surprisingly, the researchers have found that the thin helical flagellum designed by nature is not the optimal shape for small scale motion, and that a shape of a wide arc with twisted tails is more favorable. These findings were published in Science Robotics. Prof. Leshansky explains that these results would lead to developing more efficient nano- and micro-robots: “Most researchers in the field assume that a helix-like shape which mimics known biological structures is optimal. To everyone’s surprise, we found that the optimal shape is quite different from a helix, and have successfully demonstrated its higher efficiency.”
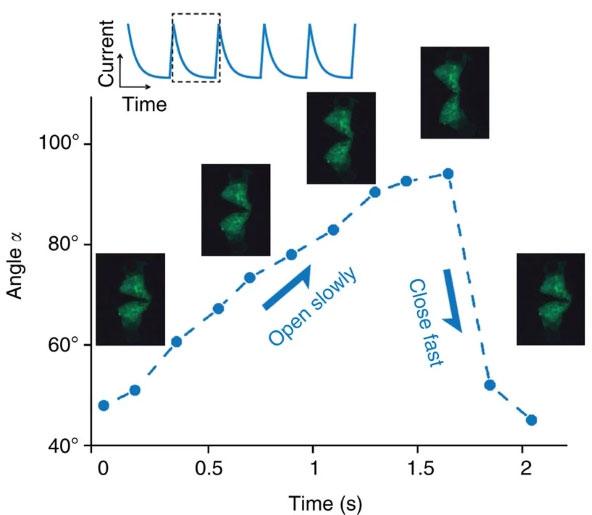
In a different work, the researchers have shown how a micro-swimmer in a form of a scallop can propel in non-Newtonian biological liquids (e.g., liquids that change their viscosity depending on the shear rate). The researchers predicted using their model that a tiny symmetric micro-scallop can propel in shear-thinning liquid using an asymmetric propulsion gait, e.g., by slow opening of its shells and subsequent fast closure. This work has led to a publication in Nature Communications. For students who are interested in this field, Prof. Leshansky recommends to take courses in mathematical models, Numerical Methods, Advanced Topics in Fluid Flow and Transport Phenomena to acquire relevant background.